
















Breaking news













Hydroid Inc will provide production support for MK-18 Unmanned Underwater Vehicle systems of US Navy.
Hydroid Inc., Pocasset, Massachusetts, is awarded a $39,414,560 modification to previously-awarded firm-fixed price, indefinite-delivery/indefinite-quantity contract (N00174-19-D-0010) to exercise Option Year One for production support for the MK-18 Family of Systems – Unmanned Underwater Vehicle systems.
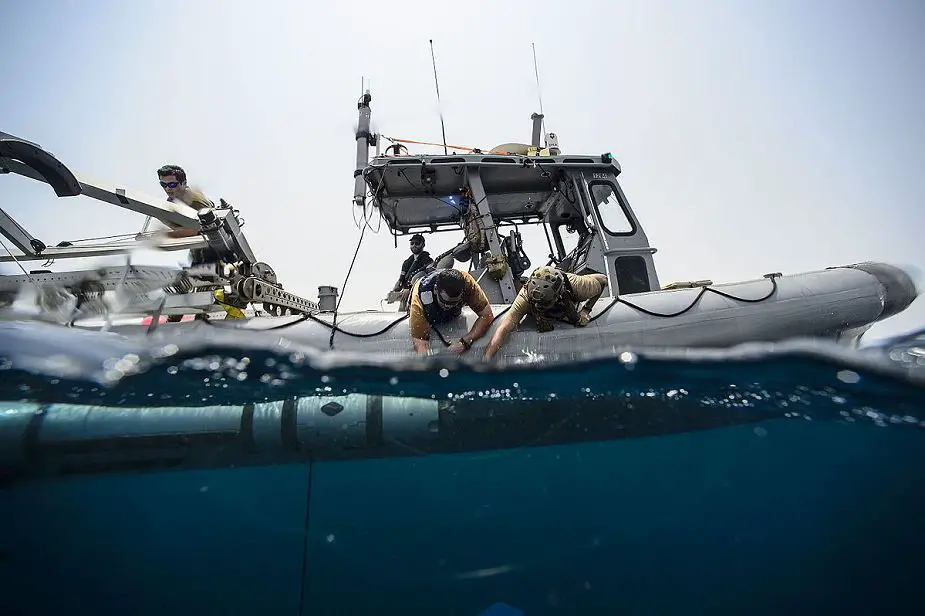 U.S. Sailors assigned to Commander, Task Group (CTG) 56.1, launch an Mk 18 Mod 2 unmanned underwater vehicle from an 11-meter rigid-hull inflatable boat.(Picture source U.S. DoD)
U.S. Sailors assigned to Commander, Task Group (CTG) 56.1, launch an Mk 18 Mod 2 unmanned underwater vehicle from an 11-meter rigid-hull inflatable boat.(Picture source U.S. DoD)
Work will be performed in Pocasset, Massachusetts, and is expected to be complete by April 2024. The Naval Surface Warfare Center, Indian Head, Explosive Ordnance Disposal Technology Division, Indian Head, Maryland, is the contracting activity.
Based on the REMUS 100, the Swordfish is designed to Search, Classify, and Map (SCM) the Very Shallow Water (VSW) Region (10‐40 ft). The Navy has a total of 24 Swordfish vehicles: EOD Mobile Unit 1 San Diego, CA : 4 Systems (12 Block A Vehicles), Mobile Diving and Salvage Unit 2 (MDSU‐2), Norfolk, VA: 1 System (3 Block A Vehicles), Naval Oceanographic and Mine Warfare Command (NOMWC), Stennis, MS: 3 Systems (9 Block B vehicles).
The REMUS Autonomous Undersea Vehicle (AUV) was first developed in the late 1990s for the Woods Hole Oceanographic Institute by Hydroid, a subsidiary of Kongsberg Maritime. The man-portable class 36 kg REMUS 100 AUV is used by the U.S. Navy for shallow water mine countermeasures (MCM) and hydrographic reconaissance.
The Mk 18 Mod 1 Swordfish UUV is capable of performing low-visible exploration and reconnaissance in support of amphibious landing; MCM operations (including search, classification and mapping; and reacquire and identification); and hydrographic mapping in the VSW zone (10 to 40 feet depth) and the seaward approaches. It is capable of navigating via acoustic transponders in long-baseline or ultra-short-baseline mode or via P-coded GPS.
Upward- and downward looking acoustic digital velocity log improves dead-reckoning accuracy. Onboard sensors include water turbidity, water temperature and conductivity, side-scan sonar, and downward-looking camera.