
















Breaking news













UK: Royal Navy tests Otter Pro, a robot survey boat for future operations.
A new robot boat which can be used to quickly survey uncharted waters and gather data has begun trials with the Royal Navy.
Follow Navy Recognition on Google News at this link
 Otter Pro (Picture source: Royal Navy)
Otter Pro (Picture source: Royal Navy)
The Otter Pro has been put through its paces at the Defence Diving School, on Horsea Island, Portsmouth, by the navy’s Project Hecla team.
They were testing the use of the remote-controlled vessel for conducting underwater survey operations where, with a range of sensors, it could gather data on the water around it and objects on the seabed.
In the tests at Horsea Lake, the Otter Pro was able to collect sonar imagery of a number of wrecks – detailing evidence of decay and structural collapse on a sunken day cruiser, motor boat and helicopter.
Its sensors also picked up swim lines and seabed erosion caused by divers.
During its first hour in the water, the vessel, controlled by trained RN personnel, proved its ability to deploy and gather survey information quickly and effectively – surveying an area the size of the pitch at Fratton Park.
Commander Graham Mimpriss, Royal Navy lead for the trials, said: “Although the Otter Pro is being operated to enable Project Hecla to refine future operating concepts of uncrewed surface vehicles in future military surveying application, it has begun to prove itself as being superior to existing portable systems.
“Using a rapid response context, this vehicle was mobilised within an hour of arrival having been transported to the site in a van.
“The team on its first outing surveyed Horsea Lake (7,000 square metres) in 40 minutes and then generated a viable product within an hour.
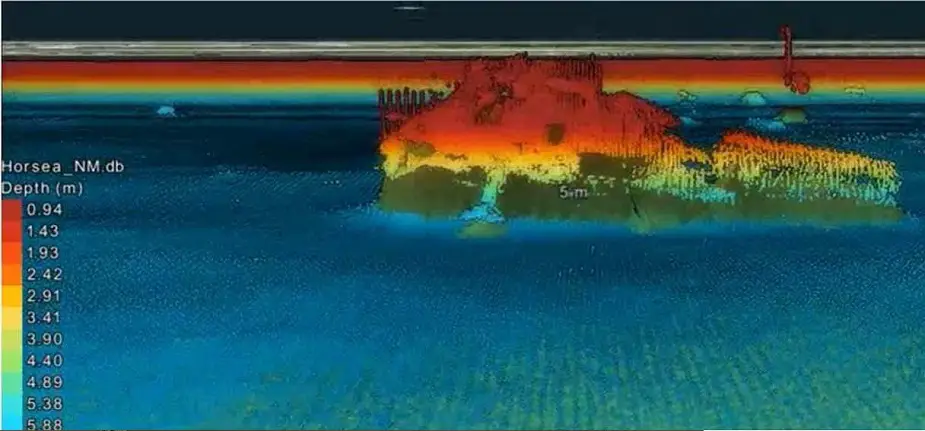
In the tests at Horsea Lake, the Otter Pro was able to collect sonar imagery of a number of wrecks – detailing evidence of decay and structural collapse on a sunken day cruiser, motor boat and helicopter. Its sensors also picked up swim lines and seabed erosion caused by divers (Picture source: Royal Navy)
“This was achieved with a team of three without the need for a boat or jetty facilities for launching or recovery. During surveying, two of the team acted as pilot and looked out for the vehicle and the third was processing the data in near real time.
“Our existing platforms would be hard pressed to match this performance in a rapid response scenario.”
The next stage of the trials will see the Otter Pro, from RS Aqua Ltd, tested in a more complex environment and its near-real time data processing will be refined. The Project Hecla team will also further examine the Otter’s Norbit multi-beam echo sounder and different sonar systems.
Cdr Mimpriss added: “This first trial has begun to demonstrate positive benefits of uncrewed surface vehicles for surveying and also highlighted changes the Royal Navy would need to make to training, personnel employment and logistics for enable full exploitation of offboard technologies.”
"This first trial has begun to demonstrate positive benefits of uncrewed surface vehicles for surveying" said Commander Graham Mimpriss

The next stage of the trials will see the Otter Pro, from RS Aqua Ltd, tested in a more complex environment and its near-real time data processing will be refined. The Project Hecla team will also further examine the Otter’s Norbit multi-beam echo sounder and different sonar systems (Picture source: Royal Navy)